One of our final projects this semester was to create a fire fighting robot. What this entails is my partner and I would design, code, and test a robot that will put out a small flame. Going in to this project at the beginning of the year was very frightening. I never thought that I would be able to program and design a robot, but by the time the end of the semester came around, I was able to apply all I learned and create something I did not think I could.
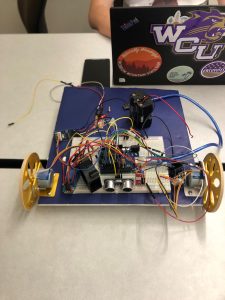
Going into this process me and my partner, John, we originally did not start on this until we had two weeks left. But once we got started it was not hard to get the ideas rolling. We started by designing and printing our wheels, motor mounts and the ping pong ball holder. Once we got all those printed we then went into laying out our robot and getting a feel for how we wanted it to be set up.

After we designed it how we wanted it to look, we then went into the wiring. Which was the hardest part. John and I at first could not get each part to run together correctly. But after some maneuvering and playing with different wires, we got it to run as one.


After figuring that all out, we then had to figure out how to properly connect our battery and our Arduino. Which did not go as planned. The first time we even put our batteries in the pack, it was so hot it melted our plastic pack. Then the second time we went to connect it to the breadboard and our Arduino started smoking. So we thought we potentially shorted our sensors and the Arduino. Luckily we tested the sensors and they were good, but we had to change our Arduino out and change around our wires. Turns out we were putting too much voltage to one area.
After solving that problem we then got our robot to run ALMOST perfectly. We did several trial runs and it worked and did everything we wanted it to. However, the fan would not turn off. Reggie The Robot would start and boot everything up, but the fan would not turn off.
After doing some more research we found out Pin 13 actually did not work. So we had to change it to Pin 12 to actually get our fan to turn off until we needed it.
After that we got it to work perfectly!
Click here to watch our robot in action!
Doing the code, John and I wanted to keep it fairly simple. We decided to write our code in phases. Phase 1, Phase 2, Phase 3, and Phase 4.
Phase 1 and 2 were similar to each other and it was the Arduino moving forward and sending signals out to see where the wall was. If it found the wall then it would stop and turn. If it does not detect a wall, then it will keep driving forward.
Phase 3 is when the Robot starts searching for a fire. It will drive forward and look for a flame. Once it sees a flame it will stop and go into phase 4, if not then it will keep looking for the flame.
Phase 4 if when the Robot will activate its fan and once the fire is out, the fan will cut off.
Recent Comments