Hello everybody,
Over the past few days, I have worked to create a wheel that I can use with my stepper motor for the final project which will be detailed in another post at a later date. In doing this, I first went through the process of designing the hub for the wheel (the part actually attached to the motor), adjusting that design for a better fit, and then printing the final wheel so that I can document its creation here. So anyway, here is the detailed process of how I came to have my wheel, and some images to show the iterations:
Using Reference Imagery:
In order to determine how I was going to make my first wheel hub, I used the same image that I used to design the motor bracket from a few weeks back. That image was:

https://cookierobotics.com/042/
Designing the Hub:
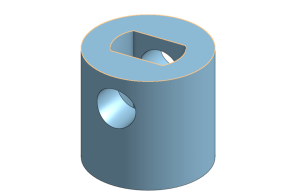
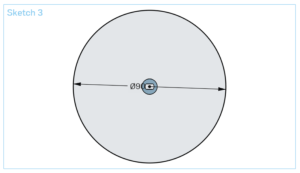
Using this image, I used the bottom left corner for reference of what dimensions the hub needed to be, created a sketch with these dimensions in mind, and extruded these desired features to about 8.5mm. After creating a hole for which I could insert a screw (for tightening purposes), I had the full part for my first iteration.
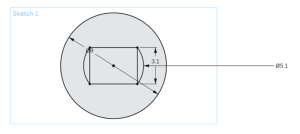
*Sketch Dimensions:
- 9mm large diameter
- 5.1mm small diameter
- 3.1mm rectangle height
Printing this part out using a Prusa Mk.3 3D Printer, I ended up with a part whose dimensions were slightly too small to fit on the motor’s shaft. As such, I went back into my CAD software and adjusted the dimensions.
 *Sketch Dimensions:
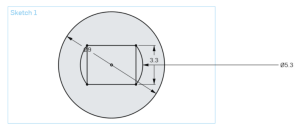
*Sketch Dimensions:
- 9mm large diameter
- 5.3mm small diameter
- 3.3mm rectangle height
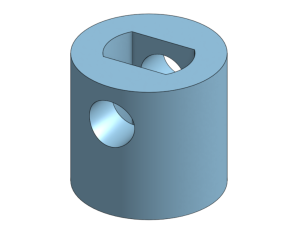
Once again printing out this part, I found that the part fit rather well on the motor shaft and that it would definitely be useable once the tightening screw was put in place.
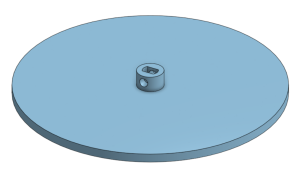
Designing the Wheel:
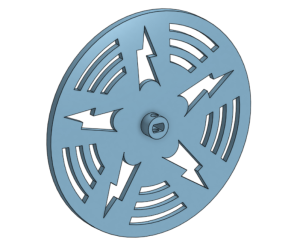
So, with a hub design that functioned in practice, I started creating the body of the wheel, making a 90mm diameter circle and extruding that circle back 3mm. I then went ahead and added some more artistic designs to the body of the wheel, not for functionality, but rather so that the part would not take as much material and would be able to print faster. This ended up working pretty well, and I was able to print out a wheel that is to my liking.
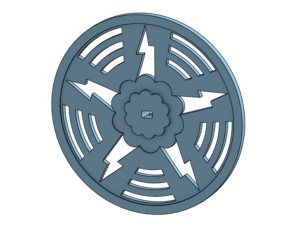
With my wheel printed, now all I need to do is work on attaching it to my motor, and my motor to the rest of my final project. Then I can focus on inputting the code for the motor and making the flame-extinguishing robot actually functional.
Bonus: (Actual Photo)

*Iterations from left to right: Iteration 1 (too small), Iteration 2 (just right), Iteration 3 (final wheel)
Recent Comments