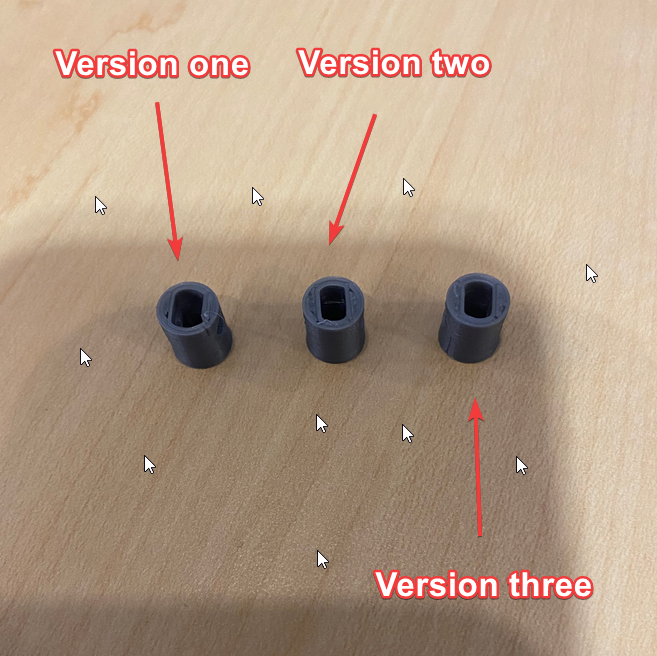
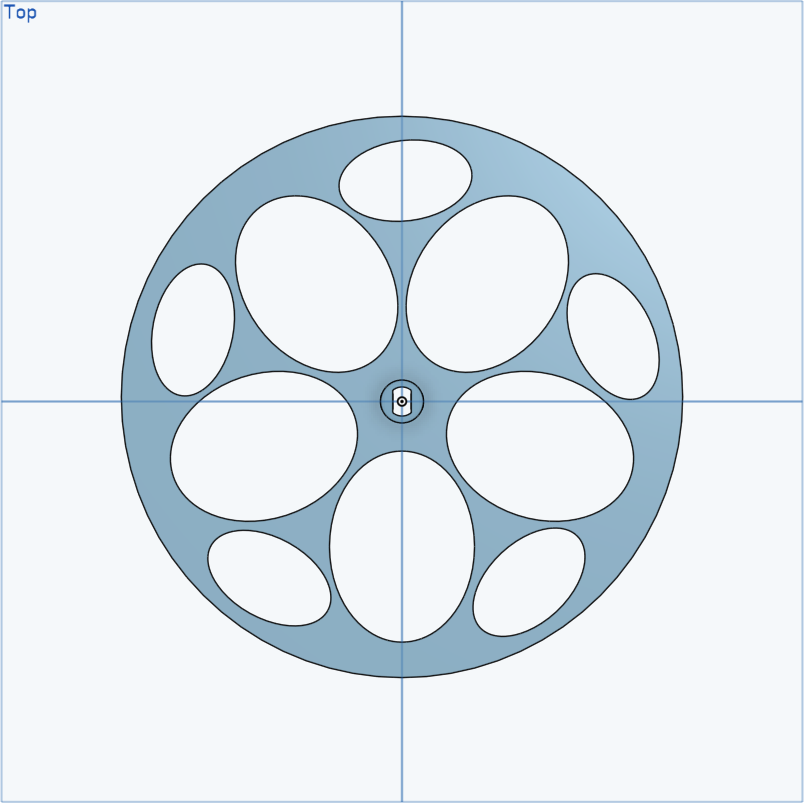
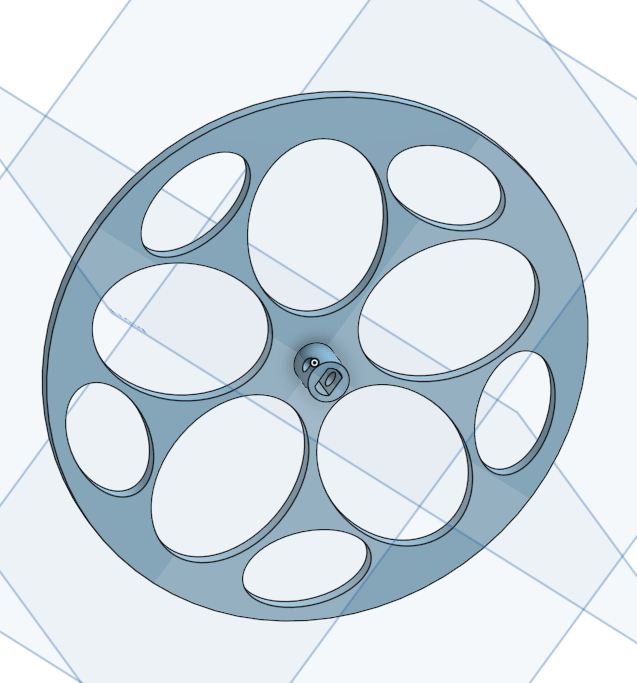
For this leg of my final project for ENGR-199, I had to create a hub that could hold a wheel onto a stepper motor. This was done in multiple iterations, printing only the part of the wheel that attaches to the stepper motor to save time and plastic. I started with an attempted print size much bigger than what I would ultimately need to fit the motor securely, this was done due to the properties of 3D printing. My first dimension was 3.8mm across, and 5.8mm from top to bottom. The actual dimensions when printed were 3.5mm and 5.6mm, they shrank significantly. It fit on the motor but was very loose. I used the actual dimensions / intended dimensions to get a coefficient to multiply my new intended size by so that it would fit perfectly. It did not fit perfectly as I made a mistake and multiplied both of my nominal measurements (3.1mm and 5.1mm) by the coefficient I got from just one of them. The values I used on my second attempt were 3.36 across and 5.48 from top to bottom. Because I got the dimension screwed up, the hub was a little too tight so I went back and rounded the value that I put into Onshape up to 3.5mm. This one fit and was the dimensions I used for my wheel. My wheel ended up getting locked in the Makers Space so I do not have a picture of it right now but I do have a picture from Onshape of what it should look like below.
Recent Comments