ENGR 200 Semester Project
Introduction
For my final project for my ENGR 200 class at WCU, me and a partner had to design a robot that could retrieve several ping pong balls from a hole in a table and move them to the other side of the table. Some of the goals for this project were to make a working robot, and the relevant constraints were the size, what we could use, and the time we had to complete the project. We created a design that utilized a crane and pincer at the end (Figure 1 and 2). When we realized that it would not work, we created a design where a scooper would retrieve the balls and then act as a jack to angle the body and let the balls roll in (Figure 3 and 4). Our final design used an arm that would scope the balls high enough to roll over the end ramp (Figure 5).

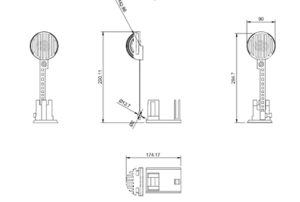
 Figure 1 and 2
Figure 1 and 2
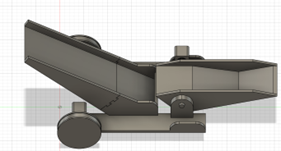
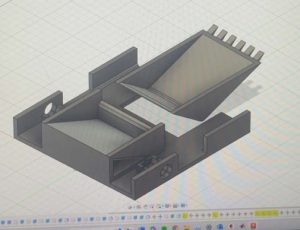
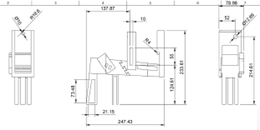
 Figure 3, 4 and 5
Figure 3, 4 and 5
Our Design Timeline

Oct 30th 2024 Start brainstorming first design, Nov 3rd 2024 Print crane and pincer pieces. Nov 13th 2024 Create second design with scooper. Nov 18th 2024 Print scooper and wheel pieces for second design. Nov 2oth 2024 Print body and motor mounts for second design. Nov 22nd 2024 Create final design and begin printing. Nov 23rd 2024 assemble final iteration.
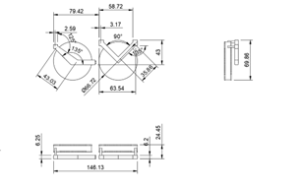
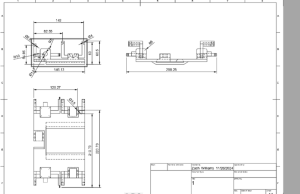
Final Design Dimensions
Here you can see our final designs dimensions.
Final Demonstration Video
Here is a video of our robot preforming the task and retrieving the ping pong balls.
Recent Comments